Implementierung eines autonomen Agenten in einer simulierten 3D-Umgebung -- Interaktion mit der Umwelt (Diploma-Theses)
David Mainzer
In our previous research we designed Jazzyk, a modular programming language for development of cognitive agent systems.
Jazzyk obeys two basic design principles: 1) it allows for an easy integration of heterogeneous knowledge representation
technologies, and 2) draws a strict distinction between modeling agent's knowledge and reasoning vs. its behaviours.
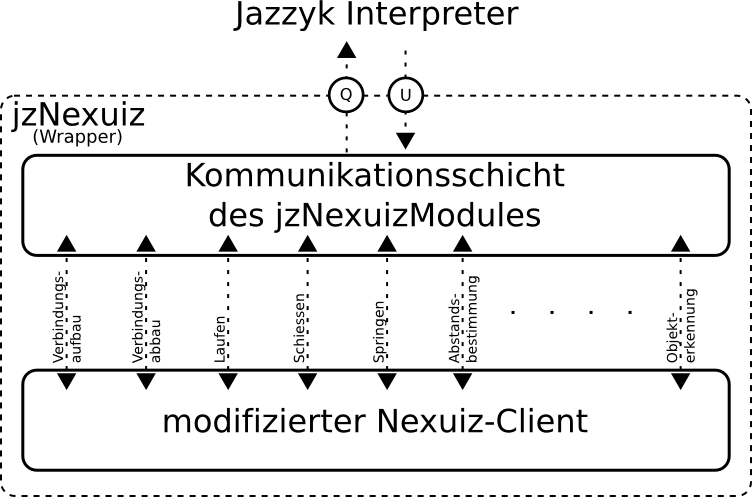
To further drive the development of Jazzyk, we implemented Jazzbot, a softbot embodied in a simulated 3D environment of
a computer game Nexuiz. The core of Jazzbot's belief base is implemented as a logic program interpreted in the semantics
of Answer Set Programming, thus exploiting the power of non-monotonic reasoning. It is complemented by a Ruby language
module for representing the bot's topological knowledge about the environment. Jazzbot
thus demonstrates the synergistic effect of using heterogeneous, in this case declarative and object-oriented,
KR technologies in a single agent system.
April 2008, Supervisor: Dix, Jürgen.